ช่วงสิ้นปีมีโอกาสทำการทดลองสองสามตัวที่เกี่ยวข้องกับ I-IoT
เริ่มด้วย
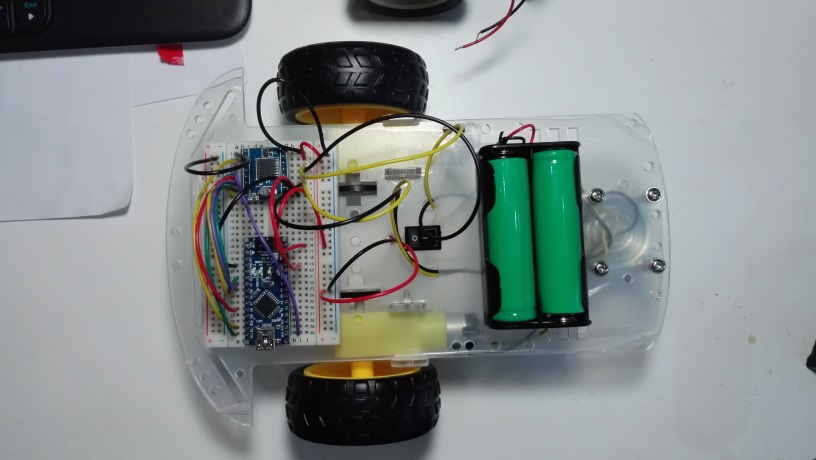
1. ใช้ Raspberry Pi อ่านสัญญาณจาก ultrasonic sensor ส่งเข้า HMI software ผ่านทาง Modbus TCP ก็เหมือนกับเป็นการทดลองทำระบบ SCADA นั่นเอง
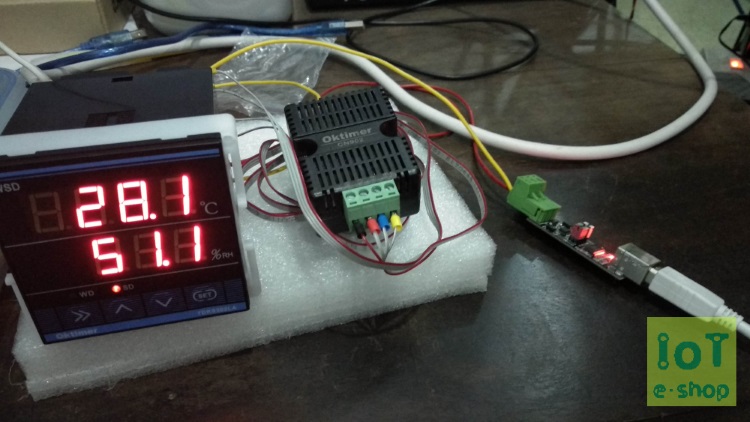
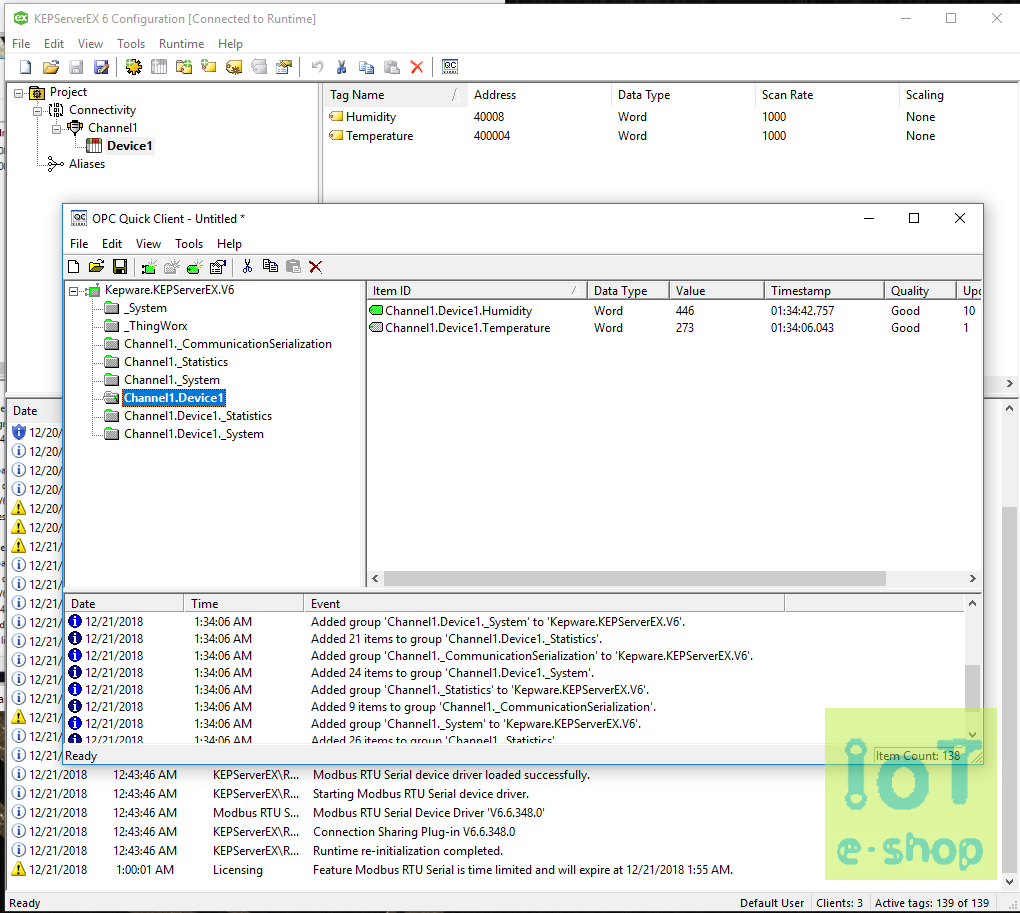
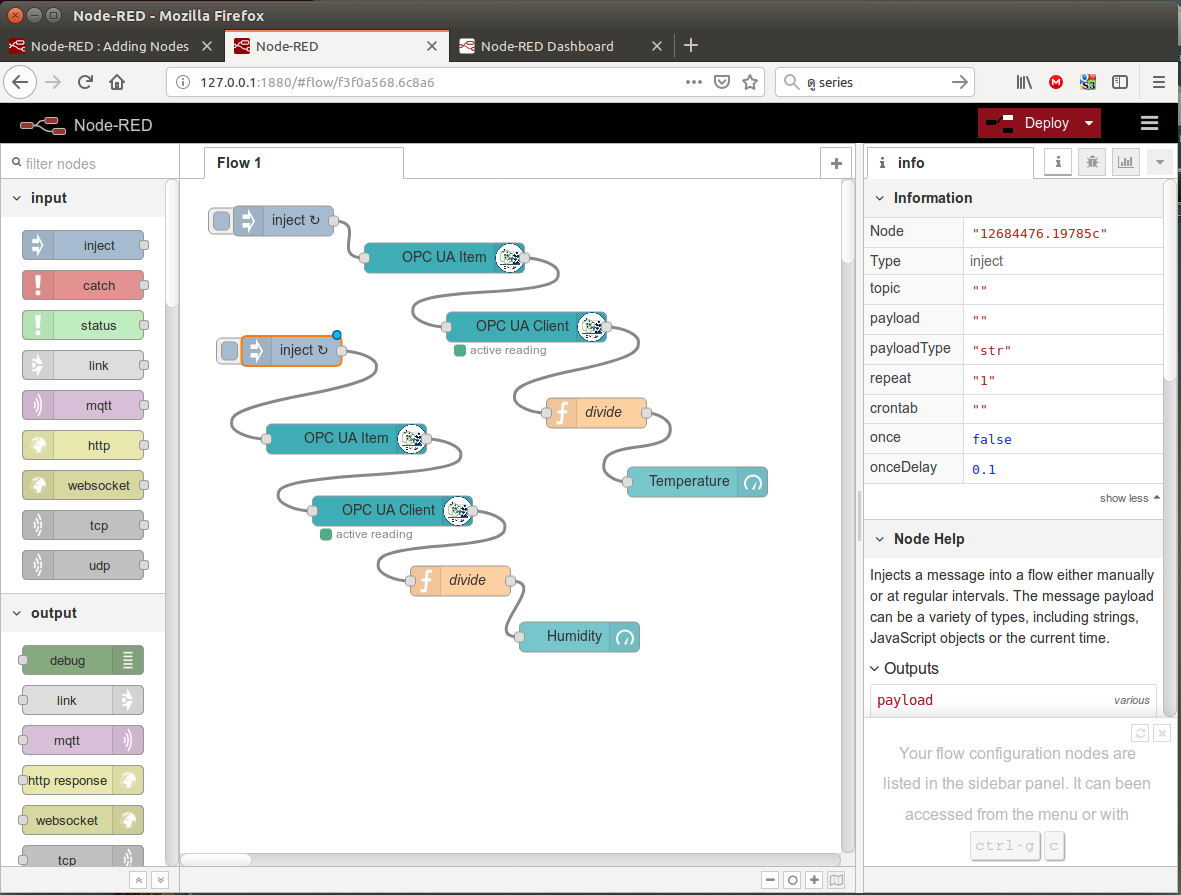
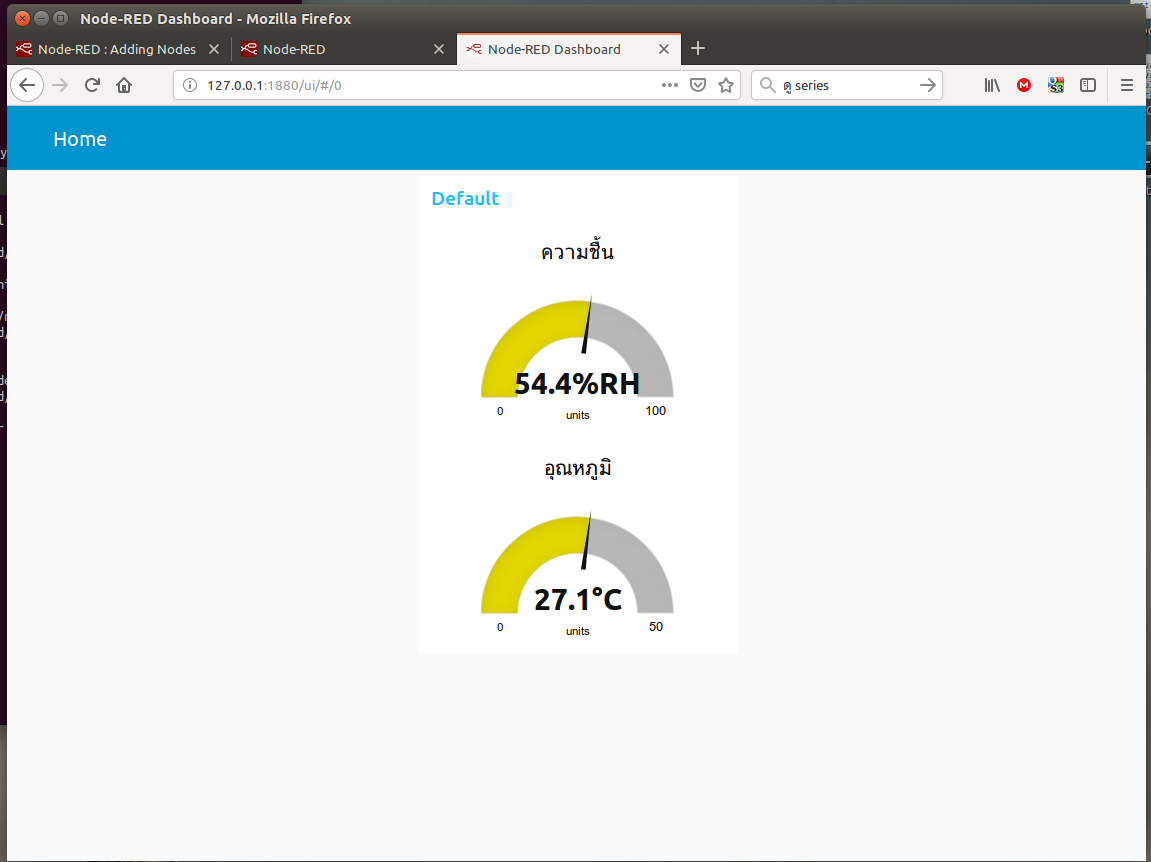
2. อ่านค่าจาก เซ็นเซอร์ ด้วยโปรโตคอล Modbus RTU ผ่านทาง RS485 แล้วส่งให้ software น่าจะเรียกได้ว่าเป็น edge software อย่าง KEPServerEX ที่ทำตัวเป็น OPC UA server แล้วให้ Node-RED ไปดึงข้อมูลมาแสดงผล โดยการสร้าง dash board และสามารถดูได้บน web browser
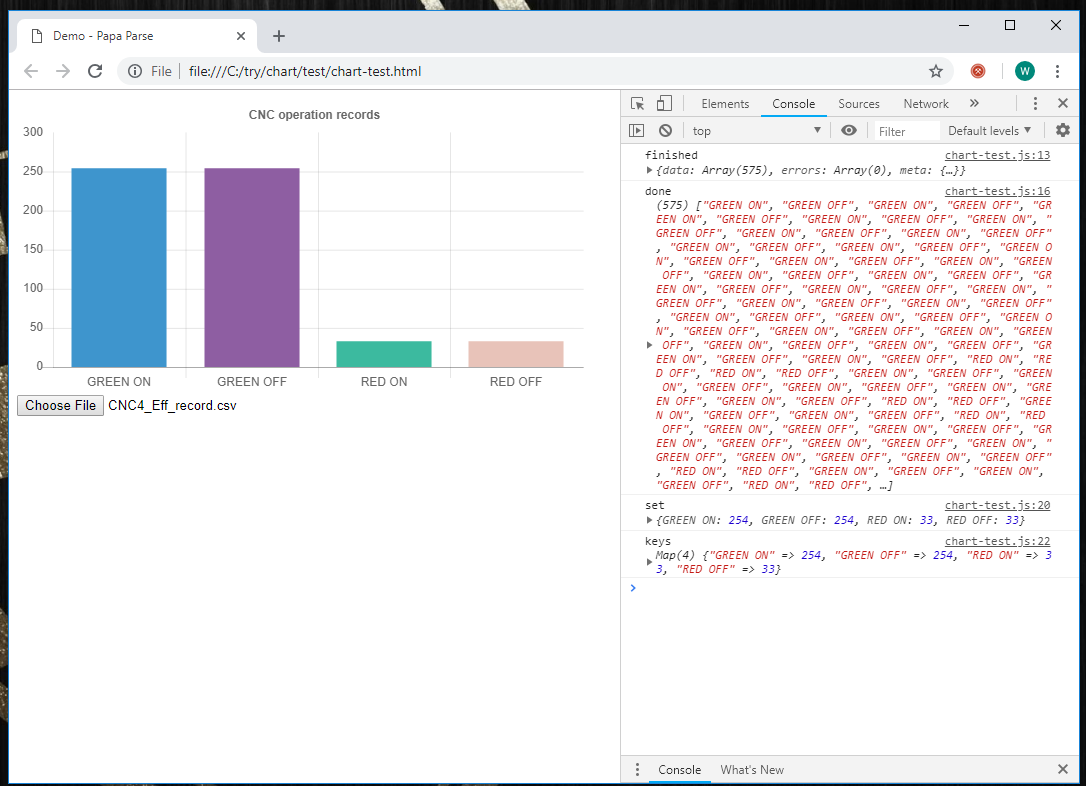
3. ส่วนอีกแบบหนึ่ง สำหรับระบบ SCADA เดิม ที่สามารถ export ข้อมูลออกมาเป็น csv หรือ excel ได้ อยากจะเอาข้อมูลการ operate ขึ้นเว็บออนไลน์ เพื่อทำการวิเคราะห์และแสดงผลออกมาเป็น ตาราง หรือ chart ต่างๆโดยไม่ต้องไปยุ่งกับระบบเดิมมากนัก ก็ใช้วิธีทำ dash board ด้วย การเขียน web application ขึ้นมาต่างหาก แล้วโยนไฟล์ที่ export ออกมาขึ้นไปให้
ใครที่สนใจต้องการทำ dash board ติดต่อได้ครับ ผมรับงานนะครับ อิอิ